资源获取和环境搭建
本节主要介绍 QuickVisor 资源获取途径,以及 QuickVisor 开发环境搭建。
下载开发工具和资料包
QuickVisor 的开发需要依赖两个工具:RealEvo-IDE 集成开发环境和 RealEvo-QuickVisor 插件。
- RealEvo-IDE:对于商业用户,建议 联系翼辉 ,购买正式版的 RealEvo-IDE 使用许可。对于试用和学习研究,可以 申请体验版 。
- RealEvo-QuickVisor:目前仅对商业用户开放,建议 联系翼辉 ,获取正式版的 RealEvo-QuickVisor 插件和使用许可。
- RealEvo-QuickVisor-SDK:目前仅对商业用户开放,建议 联系翼辉 ,获取 RealEvo-QuickVisor-SDK 资料包和使用许可。
注意:若已安装 RealEvo-IDE,请检查版本是否 ≥ 5.0.0,RealEvo-QuickVisor 的安装需依赖 RealEvo-IDE 5.0.0 及以上版本。
QuickVisor IDE 插件说明
RealEvo-QuickVisor 是基于 RealEvo-IDE 的 QuickVisor 开发组件,可用于创建和管理 QuickVisor BSP 工程(板级支持包工程) 、QuickVisor Kernel Static Lib 工程(内核静态库工程) 、QuickVisor Scenario 工程(虚拟机场景工程) 和 QuickVisor GuestOS 工程(客户机操作系统工程) 。QuickVisor 组件主要集成以下开发工具:
- 针对平台优化的编译工具链。
- 友好的代码编辑器。
- 丰富的工程向导。
注意:RealEvo-IDE 的使用手册可以在 IDE 的 Help 菜单栏下找到。QuickVisor 相关工程的说明和开发流程将在本文档的后续章节中进行介绍,同时在 IDE 的 Help 菜单栏下也可以找到 《QuickVisor IDE 使用手册》。
QuickVisor SDK 发布包说明
QuickVisor-SDK 主要包含两个目录:workspace_quickvisor 目录存放着 QuickVisor BSP 工程、QuickVisor SDK 工程、QuickVisor Scenario 工程示例,workspace_guestos 目录存放着各个 Scenario 工程示例对应的 GuestOS 代码和文档。以 quickvisor_ls1046_sdk 发布包为例,目录结构如下:
quickvisor_ls1046_sdk/
|--- README.md # SDK 发布包的说明文档
|
|--- workspace_quickvisor/ # QuickVisor 示例工程文件夹
| |--- README.md # 示例工程的说明文档
| |--- bspls1046 # QuickVisor NXP LS1046 BSP 工程
| |--- quickvisor_sdk # QuickVisor SDK 工程
| |--- test_sylixos # 用于运行单个 SylixOS 虚拟机的场景工程
| |--- test_linux # 用于运行单个 Linux 虚拟机的场景工程
| |--- test_matrix653 # 用于运行单个 Matrix653 虚拟机的场景工程
| |--- test_multi_vm_01 # 用于运行两个 SylixOS 虚拟机的场景工程
| |--- test_multi_vm_02 # 用于运行包含 SylixOS,Linux,Matrix653 的场景工程
| \--- test_baremetal # 用于在单个虚拟机中运行裸机程序的场景工程
|
\--- workspace_guestos/ # GuestOS 示例工程文件夹
|--- README.md # 示例工程的说明文档
|--- workspace_sylixos # test_sylixos 场景工程中 SylixOS 的代码和文档
|--- workspace_linux # test_linux 场景工程中 Linux 的编译和构建文档
|--- workspace_matrix653 # test_matrix653 场景工程中 Matrix653 的代码和文档
|--- workspace_multi_vm_01 # test_multi_vm_01 场景工程中 GuestOS 的代码和文档
|--- workspace_multi_vm_02 # test_multi_vm_02 场景工程中 GuestOS 的代码和文档
\--- workspace_baremetal # test_baremetal 场景工程中 裸机程序 的代码和文档
注意:每个 SDK 发布包中的内容可能会不相同,但每个发布包的目录下都会有一个
README.md文件,用户可以阅读这个README.md文件了解发布包的构成和具体的使用方法。
安装集成开发环境
安装 RealEvo-IDE
将 RealEvo-IDE 压缩包解压,打开文件夹并双击
InstallWizard.exe启动安装程序,在安装程序界面选择 Install RealEvo-IDE 进行安装,安装完成后将弹出注册对话框。
进入 RealEvo-IDE 安装引导窗口后,连续单击 下一步 至组件选择对话框。
在组件选择对话框中,选择所有可选编译器。单击 安装,等待 RealEvo-IDE 自动安装完成即可。
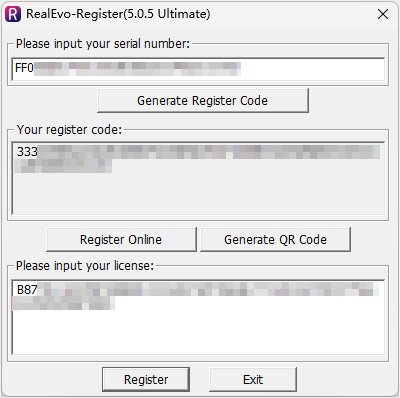
注册 RealEvo-IDE
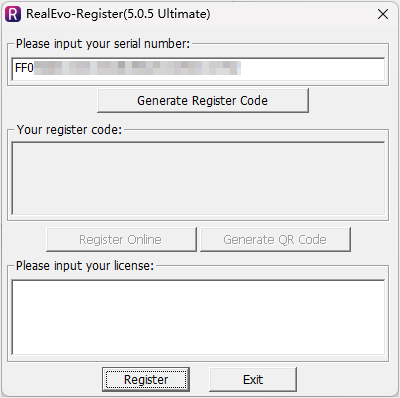
RealEvo-IDE 安装完成后将弹出注册对话框界面。用户可以联系 翼辉销售 购买正式版 RealEvo-IDE 的使用许可,或者申请 体验版 RealEvo-IDE 用于试用和学习。在注册界面顶部编辑框输入授权序列号(序列号跟随光盘或通过邮件获取),单击 Generate Register Code 进入硬盘和网卡选择对话框。
在硬盘和网卡选择对话框中选择需要绑定的硬盘和网卡,单击 OK 生成注册码。

注意: 硬盘和网卡一旦绑定则无法更改,以后该序列号只能使用绑定的硬盘和网卡注册,一旦更换硬盘或网卡,软件将不可用。因此请选择本机长期可用的物理硬盘和物理网卡,在软件注册和使用过程中该网卡不可被禁用。
配置计算机接入互联网,然后单击 Register Online ,会弹出 License 网页。
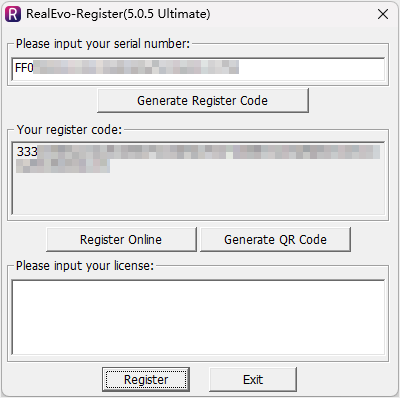
选中并复制网页中的 License 字串。

将复制的 License 字串粘贴到注册界面下方 License 输入框中,单击 Register 完成注册。
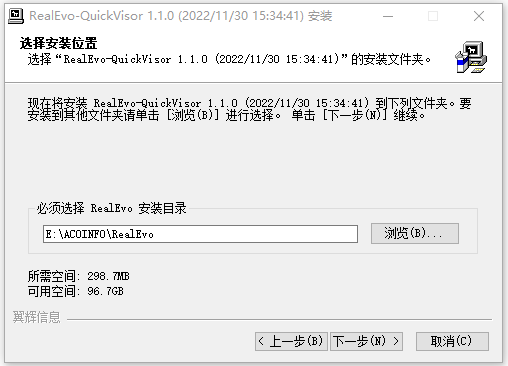
安装 RealEvo-QuickVisor
- 在安装 RealEvo-QuickVisor 插件之前要确保 RealEvo-IDE 未运行,安装过程中,安装向导需选择安装位置为 RealEvo 的安装目录。
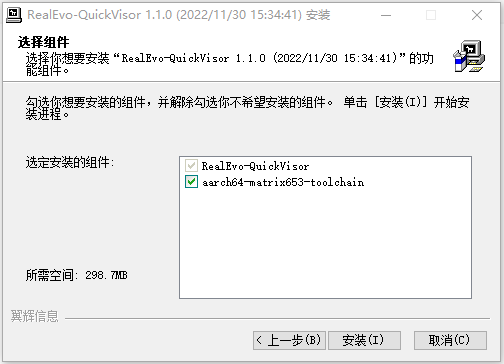
- QuickVisor 使用和 Matrix653 相同的编译器工具链,因此这里显示的是
aarch64-matrix653-toolchain。使用默认的勾选项,直接单击安装即可。
 京公网安备11010802043204号
京公网安备11010802043204号