翼辉任务关键型云原生架构
本节将介绍任务关键型云原生的现状,以及翼辉在探索任务关键型方法论后,推出的任务关键型云原生技术体系和系统架构,以及云原生创新。
任务关键型云原生现状
任务关键型云原生技术已逐步受到关注,但多数企业仍然还停留在拼凑开源技术的探索阶段,产业化落地仍充满挑战,这些领域包括但不限于:火箭卫星、飞机、高铁动车、智能电网、工业设备、智能网联汽车、高端医疗器械等。 此类系统对实时性、安全性、可靠性有极其苛刻的要求,通常需要系统具备功能安全、信息安全、故障隔离与恢复等一系列要求,任何一个环节失效都可能对生命财产和环境构成安全威胁乃至出现灾难性后果。
任务关键型系统应用场景有两个显著特征:强实时性 和 高可靠性。这些场景采用云原生方式,必须解决容器和微服务通信的实时性问题,并且在各种不同的处理器平台上提供标准化的云原生基础设施。而面向互联网应用的云原生架构适用于大规模服务器集群,运行的硬件平台标准化程度很高,其目标是提高计算资源的利用率、通信吞吐率和系统可用性,但是对有实时性约束的任务关键型应用场景不适用。
翼辉任务关键型云原生架构
翼辉信息作为中国原创操作系统和系统架构设计公司,已成功研发 SylixOS、MS-RTOS、Matrix653、EdgerOS 等操作系统,并形成了完整的自主技术体系,相关产品已广泛应用在航空航天、轨道交通、智慧电网、智能制造、网联汽车等领域。翼辉针对任务关键型系统应用的核心需求,突破 轻量级实时容器 ECS(Edge Container Stack)、微服务架构 VSOA(Vehicle SOA) 以及 容器管理平台 ECSM(Edge Container Stack Manager) 等核心技术,形成从操作系统、微服务架构到容器管理平台的全栈云原生软件技术体系,为任务关键系统提供自主可控的任务关键型云原生软件基础设施。
任务关键型云原生技术体系由翼辉完全自主研发,专为任务关键型应用场景设计,知识产权明晰,没有卡脖子风险并支持全部国产处理器。整个方案并非开源软件拼凑实现,并且整套架构完全支持私有化部署,全面满足强实时、跨平台、快速迭代开发等需求。
系统架构
翼辉任务关键型云原生系统的框架通常具有如下的结构:
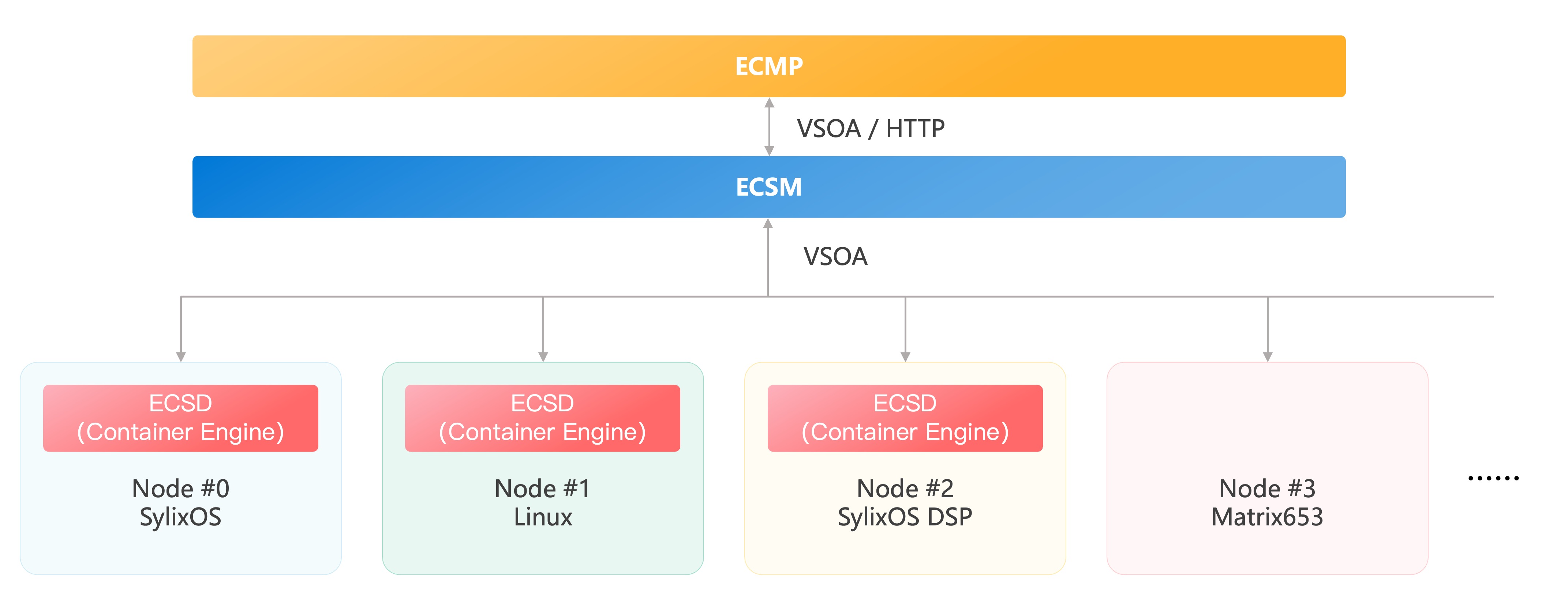
在该任务关键型云原生系统框架中含有多种不同类型的集群节点,如 SylixOS 的普通实时系统节点、Linux 的业务系统节点、SylixOS DSP 信号处理节点、AUTOSAR 节点或者 Matrix653 节点等。
ECSM 可以对安装有容器管理引擎 ECSD(Edge Container Stack Daemon) 的 SylixOS 实时节点和 Linux 的业务节点进行容器的编排管理及微服务治理。不同节点上的容器以微服务或业务应用的形态存在,彼此之间可以通过 VSOA 提供的通信手段进行跨节点的业务流转和数据互联互通。
ECSM 可以进行本地化容器镜像的存储及编排。同时,企业级综合管理平台 ECMP(Edge Computing Management Platform)可以在更高层级上对多个 ECSM 进行统一管理,实时监测各个 ECSM 集群的运行状态,并对目标集群的业务应用进行编排和状态管理。
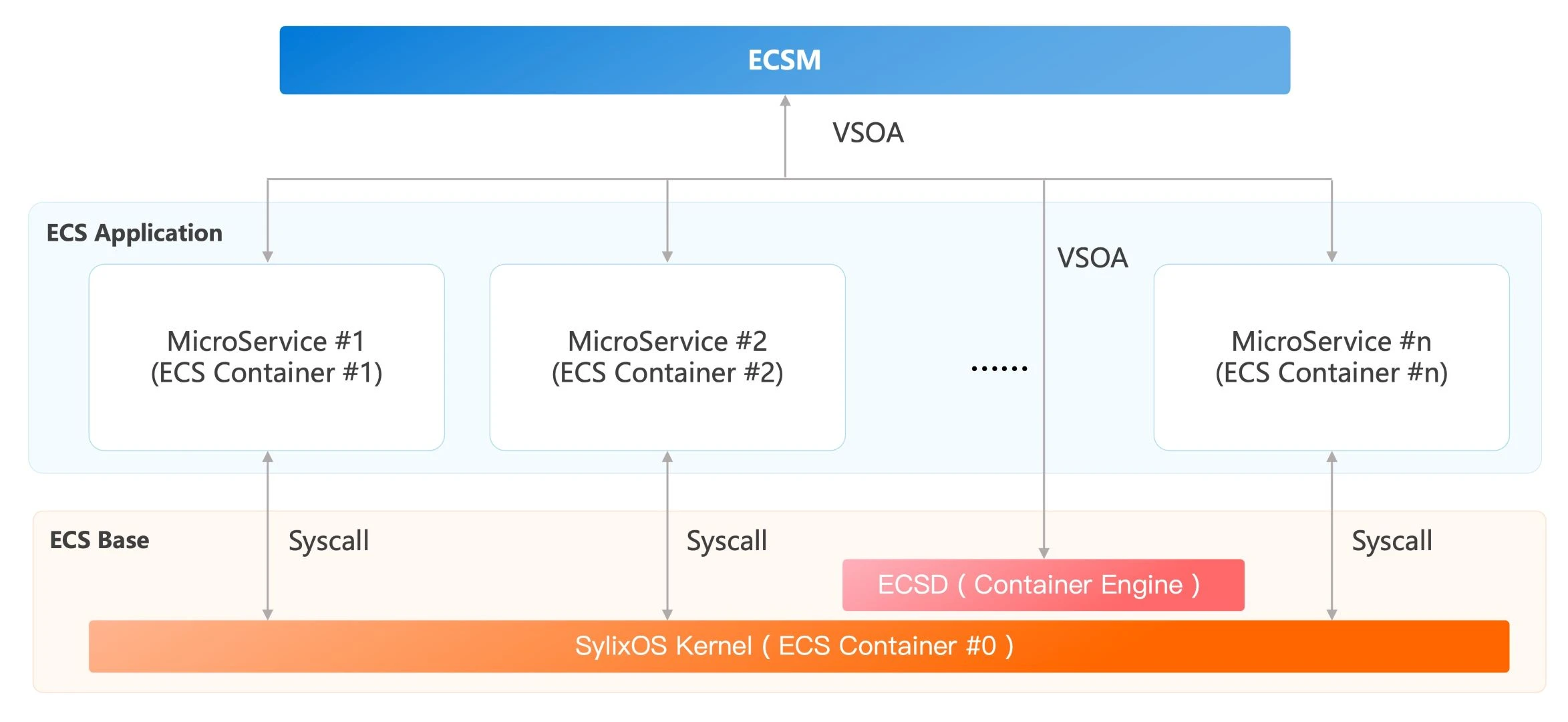
单点架构
单台计算机中同样可以部署运行云原生环境。单台设备上可以同时运行 ECSM 以及被管理调度的微服务或业务应用,彼此之间也能够通过 VSOA 的微服务架构进行通信或服务调用。
容器通过系统调用的方式将应用与操作系统内核进行隔离,并通过容器的资源隔离与权限管理功能有效避免容器内的错误扩散到其他容器或操作系统内核,极大提升整个系统的可靠性、稳定性。
翼辉任务关键型云原生创新
支持分时分区节点
翼辉任务关键型云原生系统支持将搭载 Matrix653 的设备作为微服务节点进行管理,在 Matrix653 系统中支持运行 VSOA 微服务。
支持汽车开放系统架构
翼辉任务关键型云原生系统中的 VSOA 微服务架构支持在 AUTOSAR Classic Platform 系统中运行。
支持信号处理节点
翼辉任务关键型云原生系统支持将 DSP 信号处理设备作为微服务节点进行管理,并支持 DSP 系统中的微服务编排和容器部署。
 京公网安备11010802043204号
京公网安备11010802043204号