环境准备
本节介绍了 IGC 控制器与 HMI 通讯所需的基本软、硬件环境准备。
本例程是在“IGC 控制器双机通信”中 VSOA Client 端开发 的工程基础上增加 Modbus 功能,与 HMI 设备采用 Modbus TCP 协议进行通讯,实现 HMI 可视化展示的效果。
环境列表
设备列表
| 序号 | 设备名称 | 数量 | 备注 |
|---|---|---|---|
| 1 | IGC1500 控制器 | ≥ 1 | 必选 |
| 2 | IGC1503 控制器 | ≥ 1 | 必选 |
| 3 | HMI 触摸屏 | 1 | 必选[支持 Modbus TCP 通讯协议] |
| 4 | EtherCAT 伺服电机系统 | 1 | 必选[1 个伺服控制器 + 1 个伺服电机] |
| 5 | 交换机 | 1 | 必选 |
说明:
Server 端和 Client 端也可换成两台相同设备进行通讯,即两台 IGC1500 或两台 IGC1503 分别作为 Server 端和 Client 端。 EtherCAT 伺服电机系统,本例使用 1 套汇川 EtherCAT 伺服电机系统(1 个 SV660NS2R8I 型伺服控制器和 1 台 400W 伺服电机);也可使用其他厂商的支持 EtherCAT 协议的伺服电机系统。
软件列表
| 序号 | 软件名称 | 数量 | 备注 |
|---|---|---|---|
| 1 | RealEvo-IDE | 1 | 可选[根据开发方式选择] |
| 2 | McgsPro 组态软件 | 1 | 可选[昆仑通态 HMI 触摸屏配套开发软件] |
说明:
HMI 触摸屏配套的组态软件请联系产品供应商获得,不一定是本案例的 McgsPro 组态软件。
实例工程列表
| 序号 | 名称 | 数量 | 说明 |
|---|---|---|---|
| 1 | HMI.MCP | 1 | 本工程实现对电机的控制,以及显示电机反馈的实时速度 |
| 2 | app_vsoa_client_modbus.zip | 1 | app_vsoa_client_modbus 示例工程文件。 |
下载列表
设备连接
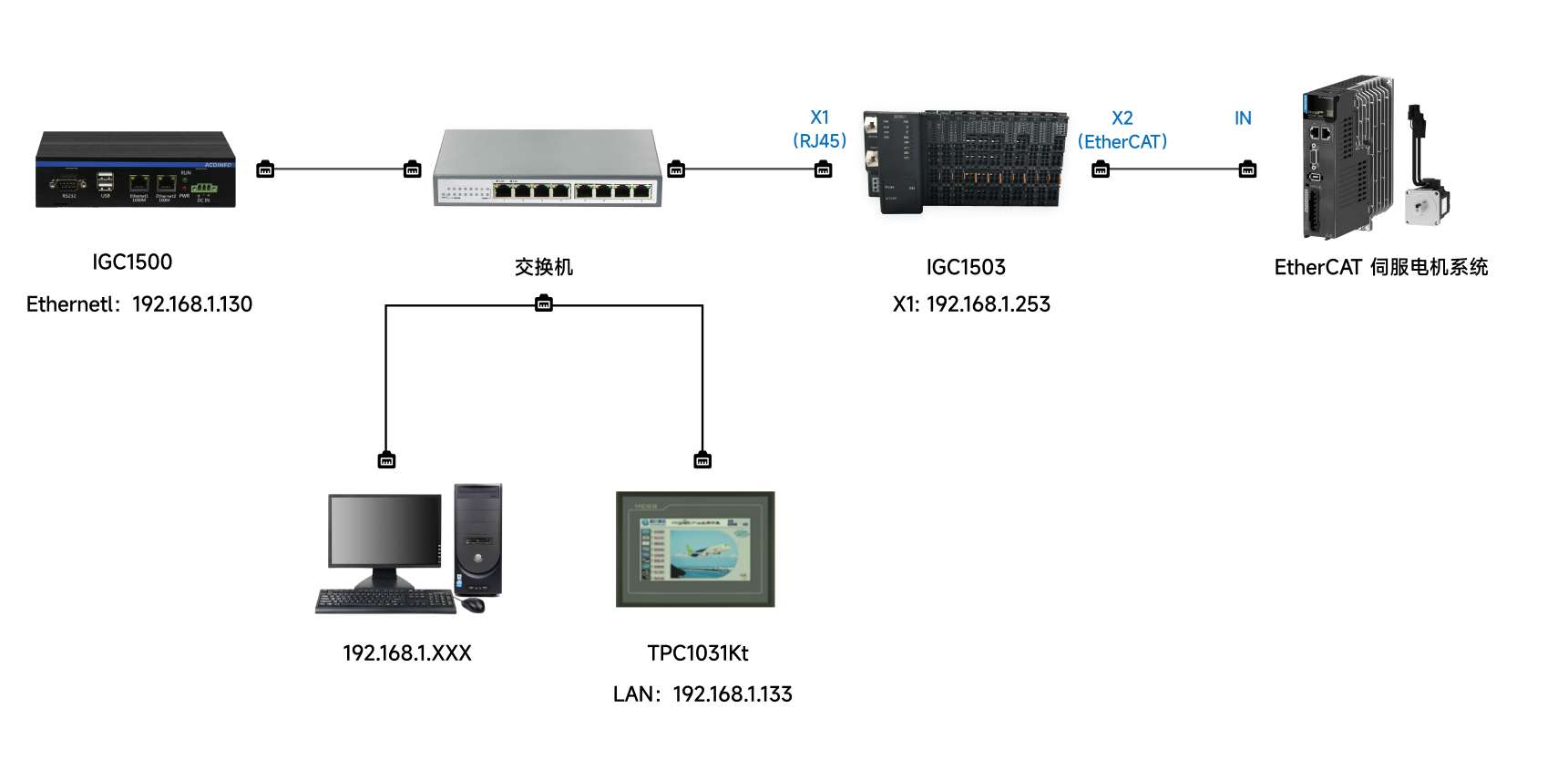
准备 IGC1500 和 IGC1503 各一台,用网线和交换机将 IGC1500 的 Ethernet1 网口(默认 IP 为 192.168.1.130)和 IGC1503 的 X1 网口(默认 IP 为 192.168.1.253)进行连接。
准备一套 EtherCAT 伺服电机系统,一根网线(也可使用 EtherCAT 专用网线)。网线一端接入 IGC1503 控制器网口 X2,另一端接入伺服控制器用于 EtherCAT 通讯的 IN 端口。
准备一台 HMI 触摸屏,一根网线。网线一端接入触摸屏网口(通过管理界面设置 IP 为 192.168.1.133),另一端接入交换机。
所有设备启动上电。
 京公网安备11010802043204号
京公网安备11010802043204号